
计算机组成原理学习笔记(2)
计算机组成原理学习笔记(2)
存储器
存储器的校验
汉明码的组成
关于纠错理论的介绍,在此不多赘述。
假设需要检测的数据为n位,则我们需要添加的检验位的位数k需要满足下列公式,当理解了如何检验数据的过程后就能对这个公式有一定程度的理解。
$$
2^{k} \geq n + k + 1
$$
汉明码是如何检验的呢?我们直接从栗子开始看。
假设我们需要传输的数据为1011,根据上面的原理,我们需要三个校验位,我们将它们放在数据的1,2,4位上,分别叫做P1,P2,P3(现在不理解也没关系)
每个校验会负责不同位置的校验,在本例中 P1负责的是1 3 5 7号位置 P2负责2 3 6 7号位置 P3负责 4 5 6 7号位置 (现在不理解没关系)
通常采用偶校验的方式,我们先来介绍如何算出校验位
| P1 | P2 | D1 | P3 | D2 | D3 | D4 |
|---|---|---|---|---|---|---|
| ? | ? | 1 | ? | 0 | 1 | 1 |
偶校验其实就是,检验位负责的各位置之和要为偶数 所以 对于P1 P1+1+0+1 为偶 所以 P1 = 0
同理 算出P2 = 1 P3 = 0 于是 我们完整的汉明码即为 0110011
假设我们 接受到的数据为 0110111 (第五位出错,我们仅考虑一位出错)
接收方如何发现第五位出错的呢?
检查校验位,P1负责的1357会变为奇数,P2的则不变,P3负责的 4567 也会变为奇数 我们检查出错区域的重合部分 即可发现是第五位出错
现在 你可能还有一些疑惑。到底是如何规定哪些校验位负责哪些区域的呢?如何保证出错区域的重合部分仅有一个数呢?
其实,校验位所负责的部分为 二进制数值编码中,所在编号位置为1的所有位置(先别骂不说人话)
举个栗子 仍是上述栗子 共有7位 可以用三位二进制数表示 0 0 0
则P1负责的位数为 所有第一位为1 的数 001 011 101 111 即1357
当 某一位出错的时候,所有出错的检验位在对应位数的值为1(先别骂不说人话)
仍然是上面的栗子 我们通过检查可以发现 P1和P3不满足偶校验原则,所以出错位的二进制数值在 第一位和第三位为1,其余位为0 所以其为101
至此 你已经理解了为什么要将P1 P2 P3 放在1 2 4号位置 (现在不理解有关系QAQ)
提高访存速度的策略
单体多字系统
由于程序和数据在存储体内是连续存放的,因此 CPU 访存取出的信息也是连续的,如果可以在一个存取周期内,从同一地址取出 4条指令,然后再逐条将指令送至 CPU 执行,即每隔 1/4存取周期,主存向 CPU送一条指令,这样显然增大了存储器的带宽,提高了单体存储器的工作速度
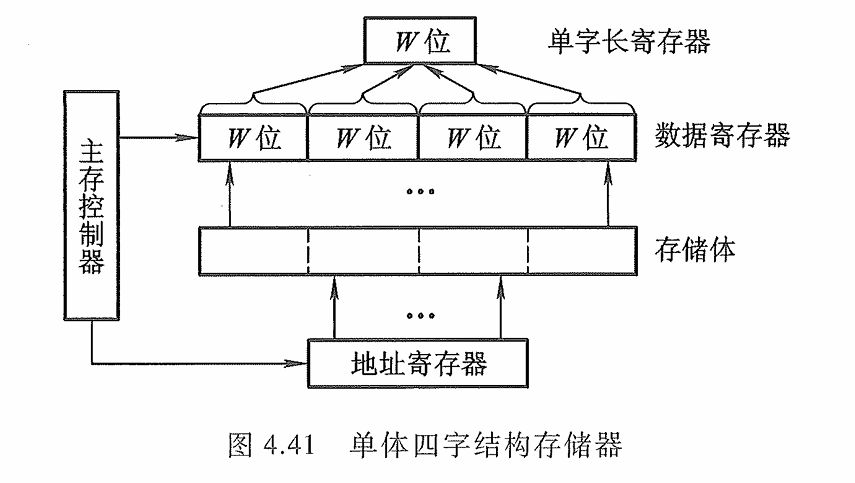
图中示意了一个单体四字结构的存储器,每字 W位。按地址在一个存取周期内可读出 4xW位的指令或数据,使主存带宽提高到4倍。显然,采用这种办法的前提是:指令和数据在主存内必须是连续存放的,一旦遇到转移指令,或者操作数不能连续存放,这种方法的效果就不明显。
多体并行系统
多体并行系统就是采用多体模块组成的存储器。每个模块有相同的容量和存取速度,各模块各自都有独立的地址寄存器(MAR) 、数据寄存器(MDR)、地址译码、驱动电路和读/写电路,它们能并行工作,又能交叉工作。
高位交叉
并行工作即同时访问 N个模块,同时启动,同时读出,完全并行地工作(不过,同时读出的 N个字在总线上需分时传送)。图4.42是适合于并行工作的高位交叉编址的多体存储器结构示意图,图中程序因按体内地址顺序存放(一个体存满后,再存入下一个体),故又有顺序存储之称。
显然,高位地址可表示体号,低位地址为体内地址。按这种编址方式,只要合理调动,使不同的请求源同时访问不同的体,便可实现并行工作。例如,当一个体正与 CPU交换信息时,另一个体可同时与外部设备进行直接存储器访问,实现两个体并行工作。这种编址方式由于一个体内的地址是连续的,有利于存储器的扩充。
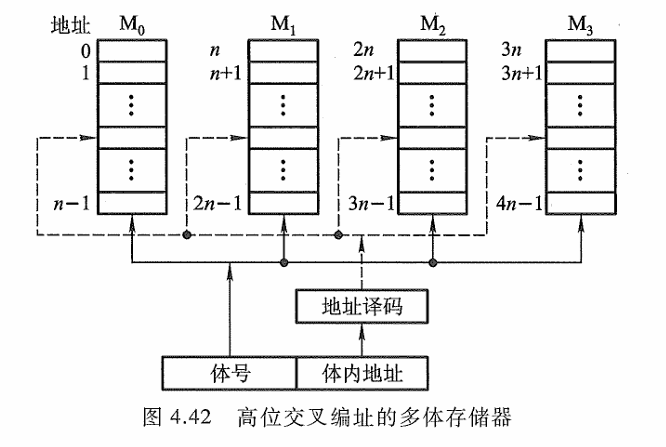
高位交叉并不能提高性能。
低位交叉
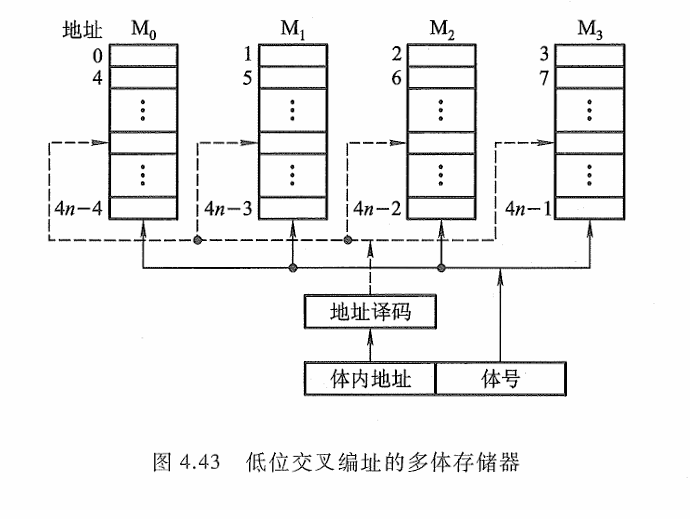
采用低位交叉的方式,连续的数据存在不同的存储器中。采用交叉编址的方式,显然低位地址用来表示体号,高位地址为体内地址。这种编址方法又称为模M编址(M等干模块数)

多体模块结构的存储器采用交叉编址后,可以在不改变每个模块存取周期的前提下,提高存储器的带宽。图4.44示意了CPU交叉访问4个存储体的时间关系,负脉冲为启动每个体的工作信号。虽然对每个体而言,存取周期均未缩短,但由于CPU交叉访问各体,使4个存储体的读/写过程重叠进行,最终在一个存取周期的时间内,存储器实际上向CPU提供了4个存储字。如果每个模块存储字长为32位,则在一个存取周期内(除第一个存取周期外),存储器向CPU提供了32x4=128位二进制代码,大大增加了存储器的带宽。
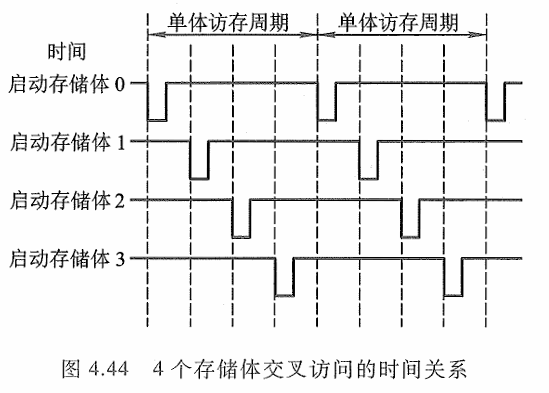
假设每个体的存储字长和数据总线的宽度一致,并假设低位交叉的存储器模块数为n,存取周期为T,总线传输周期为τ,那么当采用流水线方式(如图4.44所示)存取时,应满足T=nτ。为了保证启动某体后,经nτ时间再次启动该体时,它的上次存取操作已完成,要求低位交叉存储器的模块数大于或等千n。以四体低位交叉编址的存储器为例,采用流水方式存取的示意图如图4.45所示。
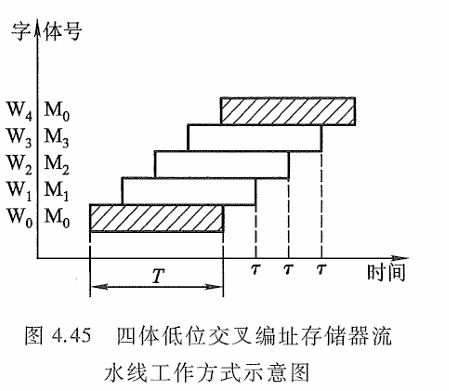
可见,对千低位交叉的存储器,连续读取n个字所需的时间 t1 为t1 =T+(n-1)τ
若采用高位交叉编址,则连续读取 n个字所需的时间 t2 为 t2 =nT
打个比方,总线跑的快,他需要从多个体中取数据,之前总线是敲敲第一家门,等存储体把数据送出来,送到CPU后,还要到第一家送货一直等。
而现在,连续的数据在不同的家门,总线只需要挨家挨户敲门,等第一家开门后送第一家,回来的时候第二家已经开门了,就能实现持久的送货,提高效率。
高速缓冲存储器
在多体并行存储系统中,由于I/0设备向主存请求的级别高于 CPU访存,这就出现了 CPU等待 I/0 设备访存的现象,致使 CPU 空等一段时间,甚至可能等待几个主存周期,从而降低了CPU 的工作效率。为了避免 CPU 与 I/0 设备争抢访存,可在 CPU 与主存之间加一级缓存,这样,主存可将 CPU 要取的信息提前送至缓存,一旦主存在与 I/0 设备交换时,CPU 可直接从缓存中读取所需信息,不必空等而影响效率。这就是Cache的由来。
Cache
局部性原理
- 时间局部性:程序马上要用的数据可能就是现在正在频繁访问的数据
- 空间局部性:程序马上要用的信息很可能就是现在正在访问的数据周围的数据
Cache访问主存是按照块来搬运的,每次将一块的数据搬运到Cache中
Cache的工作原理
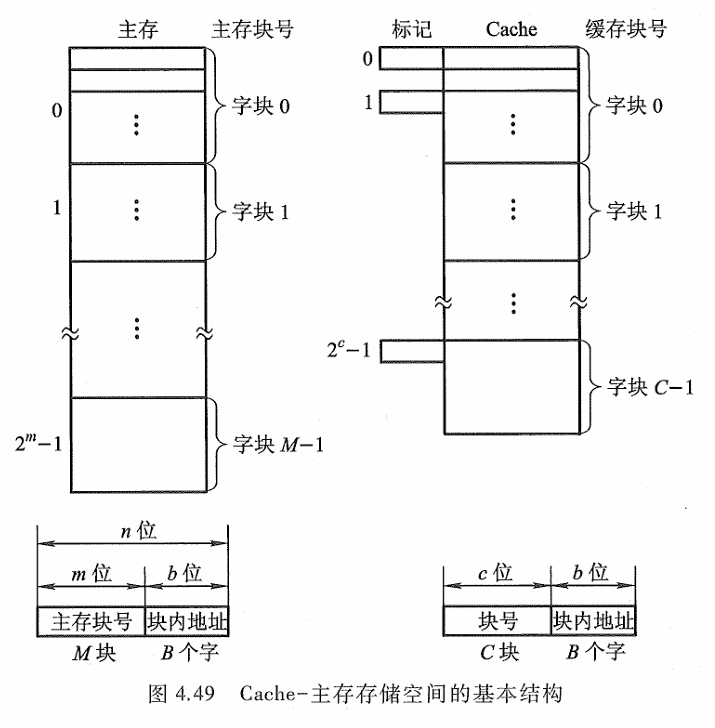
主存由 2n 个可编址的字组成,每个字有唯一的 n位地址。为了与 Cache 映射,将主存与缓存都分成若干块,每块内又包含若干个字,并使它们的块大小相同(即块内的字数相同)。这就将主存的地址分成两段:高m位表示主存的块地址,低b位表示块内地址,则 2^m=M表示主存的块数。
同样,缓存的地址也分为两段:高c位表示缓存的块号,低 b位表示块内地址,则 2^c= C表示缓存块数,且 C远小于M。主存与缓存地址中都用 b位表示其块内字数,即B=2^b 反映了块的大小,称B为块长。
任何时刻都有一些主存块处在缓存块中。 CPU 欲读取主存某字时,有两种可能:一种是所需要的字巳在缓存中,即可直接访问 Cache(CPU 与 Cache 之间通常一次传送一个字) ;另种是所需的字不在Cache 内,此时需将该字所在的主存整个字块一次调入 Cache 中(Cache 与主存之间是字块传送)。如果主存块已凋入缓存块,则称该主存块与缓存块建立了对应关系。
上述第一种情况为 CPU访问 Cache命中,第二种情况为 CPU访问 Cache 不命中。由于缓存的块数 C远小于主存的块数M,因此,一个缓存块不能唯一地、永久地只对应一个主存块,故每个缓存块需设一个标记 ,用来表示当前存放的是哪一个主存块,该标记的内容相当于主存块的编号。 CPU读信息时,要将主存地址的高 m 位(或 m位中的一部分)与缓存块的标记进行比较,以判断所读的信息是否已在缓存中。
Cache 的容量与块长是影响 Cache 效率的重要因素,通常用”命中率”来衡量 Cache 的效率。
在一个程序执行期间,设 $N_c$ 为访问 Cache 的总命中次数,$N_m$ 为访问主存的总次数,则命中率 $h$ 为
$$
h = \frac{N_c}{N_c + N_m}
$$
设 $t_c$ 为命中时的 Cache 访问时间,$t_m$ 为未命中时的主存访问时间,$1-h$ 表示未命中率,则 Cache-主存系统的平均访问时间 $t_a$ 为
$$
t_a = ht_c + (1-h)t_m
$$
当然,以较小的硬件代价使 Cache-主存系统的平均访问时间 $t_a$ 越接近于 $t_c$ 越好。用 $e$ 表示访问效率,则有
$$
e = \frac{t_c}{t_a} \times 100% = \frac{t_c}{ht_c + (1-h)t_m} \times 100%
$$
显然,h越接近1,访问效率越高




